My enemy AI is built around a Behavior Tree system that handles decision-making for all enemy types. For movement, I rely on a variety of Steering Behaviors to create smooth and dynamic motion across the environment.
Steering Behaviors
View my Steering Behavior on GitHubAside from classic Seek, Arrival, and Separation, I’ve implemented three custom steering techniques that improve my AI movement:
Object Separation Steering
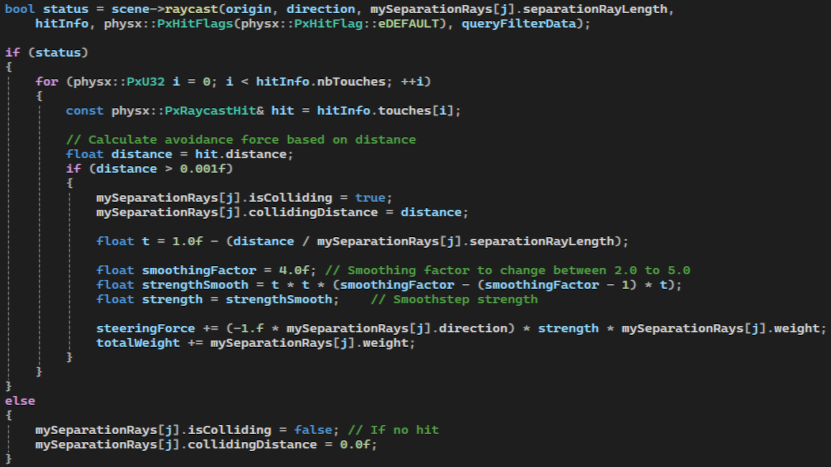
This behavior uses a series of short rays cast in fixed directions from the enemy. These rays interact only with the environment, not other enemies. The closer a ray hits an object, the stronger the steering force is applied away from it using a lerped weighting system. This helps enemies avoid walls and tight spaces more naturally.
Navmesh Edge Steering
Ground enemies are nudged back toward the navmesh path if they start drifting. This is made efficient through a gridded navmesh layout, allowing enemies to quickly check if they're veering off course and stay aligned with the walkable areas.
Spread Steering
This behavior ensures that enemies don't stack in a straight line by applying horizontal and vertical spacing between them. It creates more natural formation movement and reduces crowding.
Seek Steering
Seek behavior is used to move toward the next pathfinding point. Once close enough to the target, the enemy increments to the next point in the path.
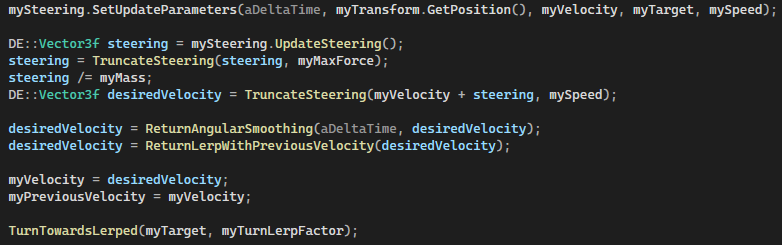
Enemy Steering Update
Object Separation Steering snippet
Enemy Types
View my Enemy code on GitHubGround Enemies
Ground units stay grounded using PhysX, sampling the Y-position from the terrain below. If the player is in their path to the defense target, they lunge to bite. When close to the defense point, they perform a final lunge to damage the target, sacrificing themselves in the process.

Ground Enemy Logic in Action
Note: The model animates away from its true position, causing a visual mismatch with its actual coordinates.
Lunging to destroy the drill
Flying Shooter
This enemy type uses a projectile pool and fires in a 5-shot burst, alternating between left and right shots. If it sees the player or a defense target, it engages immediately. If the player hides, it searches the last known location for a limited time before resuming its path toward the defense point.


Flying Kamikaze
A drone-type enemy that seeks out the player or a defense point and explodes on impact. It uses the same visibility system as the shooter to determine when to engage.

Enemy Management
Wave Manager
All enemies are controlled by a centralized WaveManager, which manages an EnemyPool based on the largest possible wave defined by our level designers’ generated bin files. This ensures maximum reuse and efficiency. Read more about it here in Wave Manager.
Debugging Tools
I’ve implemented several tools to help visualize and debug enemy behavior in real-time:

Path Rendering
Displays each enemy’s current path and next target waypoint.
Velocity Vectors
Shows the direction and magnitude of each enemy’s movement.
Steering Rays
Visualizes Object Separation rays. Penetration depth is color-coded — the part penetrating a collider changes color.
Parameter Tweaking
I can dynamically adjust: Steering weights, Arrival/Separation radius, Mass, Speed, and Max Force.
Ray Presets
I can add or swap steering ray configurations on the fly using defined presets.
All Steering Ray presets added
Behavior Tree
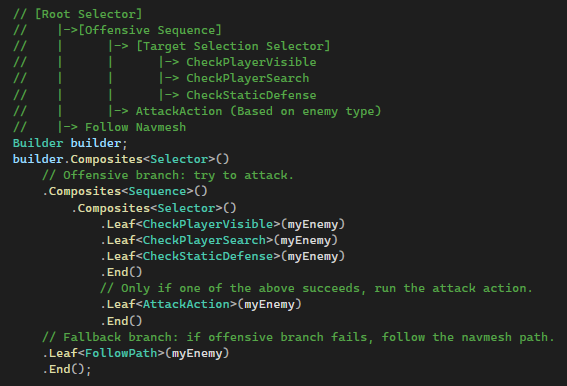
View my Behavior Tree on GitHubAll enemies use a simple Behavior Tree to make decisions based on their current situation. This tree handles targeting, attacking, and fallback behaviors depending on what the enemy sees or senses.
Player Visibility Check
The tree first checks if the player is visible. If true, the enemy transitions into an attack behavior using a lunge, shooting, or explosion depending on the enemy type.
Static Defense Targeting
If the player isn’t visible, the enemy checks for nearby static defense targets. If one is present, the enemy attacks the structure instead.
Path Following
If neither the player nor a defense target is visible, the enemy follows its navmesh path using steering behaviors until re-engaging.
Structure
The Behavior Tree is built using a Selector at the root, which evaluates child Sequences in order. Each Sequence contains specific conditions and corresponding actions, ensuring simple but responsive decision-making.
Challenges and What I Learned
This was the first time I implemented an AI system for a 3D game, which in itself was a challenge. To make things even more difficult, I decided to go beyond the assignment requirements and create flying enemies instead of just ground-based ones. That decision brought a whole new layer of complexity I hadn’t anticipated. One of the biggest struggles I faced was time. Since this was part of a school project, I couldn’t dedicate all my attention to the AI system—I also had to handle navmesh generation, and other gameplay-related features. As a result, development often got put on hold or had to be squeezed into shorter sessions.
Another challenge was ensuring that the game could handle a large number of active enemies at the same time. I wanted the player to face intense waves, but this pushed me to focus heavily on performance optimization. I eventually found that gridding the navmesh helped tremendously when managing access for over 100 enemies in a single frame. It reduced lookup times and helped the AI run more smoothly.
Through this process, I learned a lot about the limitations and design considerations of flying AI. If I were to build something similar again, I would implement a full 3D grid instead of solely relying on steering away from obstacles and using navmesh nodes as navigation. While that simpler approach worked for this tower defense-style game, it didn’t handle every situation perfectly—especially when enemies risked getting stuck when lured by the player into a complex environment.
I also discovered the value of behavior trees for structuring enemy logic. They offered a clean and scalable way to organize actions and decisions. However, I underestimated the time needed to build a well-thought-out tree. In retrospect, I would’ve liked to explore more complex behavior flows, with additional decision layers and dynamic reactions built directly into the tree.
Despite the challenges, this project gave me a deeper understanding of how to build AI that performs well in real-time environments, especially under performance and time constraints.